
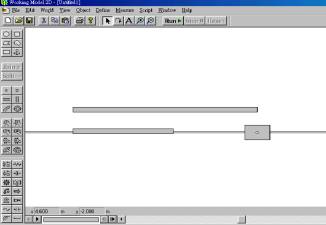
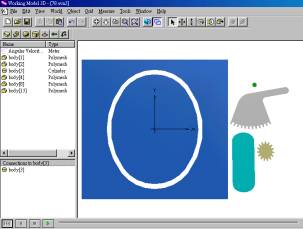
司羅兩氏直線機構(2D) :
在本實例中需要三個質量物件:66cm連桿;36cm長連桿;6×0.9mm方塊。
建構連桿元件
(1)製作連桿:
1.
從工具欄中選取矩形工具。
2.
移動游標以形成一矩形。
(2)調整連桿元件大小:
1.
選取矩形,並從Window選單選取Geometry項。
2.
在Height及Width欄分別鍵入輸入所需之尺寸。
(3)定位連桿元件:
1.
選取連桿,並在連趕上按兩次滑鼠鍵,特質工具視窗將顯示。
2.
輸入所需之座標。
建構連桿元件
建構滑塊上的溝槽
(1)選取水平溝槽工具。
(2)在滑塊上按下滑鼠鍵,然後在溝槽上按兩下滑鼠鍵,特質工具視窗將顯現於螢幕上。
(3)輸入所需之座標。
建構滑塊上的溝槽
建構連桿元件上的接點
(1)製作連桿元件上的接點:
1.
按取工具欄中的點工具。
2.
再連桿元件上按下滑鼠鍵,則連桿元件上將出現一接點。
(2)定位此接點:
1.
在此點上按兩次滑鼠鍵,特質功能視窗將顯現。
2.
按取X欄並輸入所需之座標。
3.
按取Y欄並輸入所需之座標。
(3)連接元件與元件之接點:
1.
同時選取欲連接元件之接點。
2.
按下工具欄中的Join鍵。
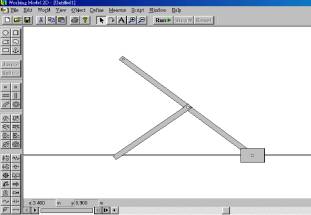
建構連桿元件上的接點
建構驅動馬達
(1)選取工具欄中的馬達限制。
(2)在連桿所需位置按下滑鼠鍵。
防止碰撞
(1)同時選取所有的元件,可利用Shift建同時選取。
(2)從Object選單選取Do Not Collide項。
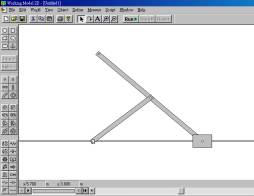
司羅兩氏直線機構(2D)
至此模組已完成並且可以開始執行模擬,按下工具欄中的Run選項即可觀看模擬情形。
直齒斜齒輪機構(3D)
:
在本實例中需要兩個質量物件:兩個直齒斜齒輪。
(1)利用Solid
Edge(或其他軟體)繪製兩個直齒斜齒輪。

直齒斜齒輪
(2)轉換成ACIS檔再運用Working
Model所附之軟體轉換成wm3模式。
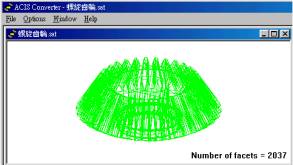
直齒斜齒輪(wm3)
(3)設定座標、馬達、接點、碰撞即可開始模擬。
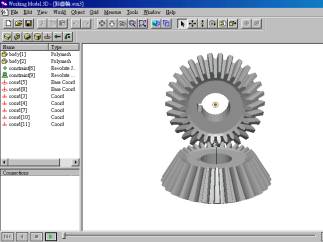
直齒斜齒輪機構(3D)
凸輪控制式行星齒輪機構(3D)
:
在本實例中需要五個質量物件:正齒輪、扇形齒輪、凸圓、連桿、圓柱。
(1)利用Solid
Edge(或其他軟體)繪製正齒輪、扇形齒輪、凸圓、連桿、圓柱。
(2)轉換成ACIS檔再運用Working
Model所附之軟體轉換成wm3模式。
(3)從File選單選取Import項將原件匯聚。
五個質量物件
(4)設定座標、扭力、接點、碰撞即可開始模擬。
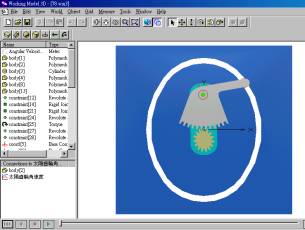
凸輪控制式行星齒輪系(3D)